Prototype development of mecanum wheels mobile robot: A review
DOI:
https://doi.org/10.23917/arstech.v1i2.39Keywords:
Driving control , Dynamic modelling , Kinematic analysis , Mecanum wheels , Prototype developmentAbstract
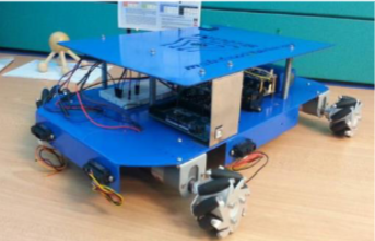
This paper provides the review and prototype development of mecanum wheels mobile robot (MWMR). Nowadays, there is a high market demand for a wheeled machine or wheeled robot for various applications. The ability to move in any direction without altering even a single wheel makes this type of wheel useful for driving, especially in a narrowed or confined space. Various styles of implementing MWMR are discussed in this paper. The kinematic derivation and dynamic modelling are also presented. Characteristically, mecanum wheels face traditional mobile application issues like jerking and slippage, contributing to low positioning accuracy and repeatability. Besides, environmental factors like disturbance and uncertainty also contribute to these issues. The control strategies in previous research have been reviewed and presented in this paper to reduce the effect. Finally, a low-cost prototype of MWMR was developed as an experimental platform for future study.
Downloads
References
J. Park, S. Kim, J. Kim and S. Kim, "Driving control of mobile robot with Mecanum wheel using fuzzy inference system", International Conference on Control, Automation and Systems (CCAS), Gyeonggi-do, pp. 2519-2523, 2010. https://doi.org/10.1109/ICCAS.2010.5670241.
Y. Uchida, T. Saito, and T. Hatakeyama, “Development of a multi-purpose module system using mecanum wheel module”, International Journal of Applied Electromagnetics and Mechanics, vol. 59, no. 3, pp.967–975, 2019. https://doi.org/10.3233/JAE-171096.
Y. Jia, X. Song and S. S. Xu, "Modeling and motion analysis of four-mecanum wheel omni-directional mobile platform", International Automatic Control Conference (CACS), Nantou, pp. 328-333, 2013. https://doi.org/10.1109/CACS.2013.6734155.
A. Shimada, S. Yajima, P. Viboonchaicheep and K. Samura, "Mecanum-wheel vehicle systems based on position corrective control", The 31st Annual Conference of IEEE Industrial Electronics Society (IECON), Raleigh, NC, 2005, pp. 2077–2082, 2005. https://doi.org/10.1109/IECON.2005.1569224
J.-B. Song and K.-S. Byun, “Design and control of a four-wheeled omnidirectional mobile robot with steerable omnidirectional wheels”, Journal of Robotic Systems, vol. 21, no. 4, pp.193–208, 2004. https://doi.org/10.1002/rob.20009.
P. Muir and C. Neuman, "Kinematic modeling for feedback control of an omnidirectional wheeled mobile robot", Proceedings. 1987 IEEE International Conference on Robotics and Automation, Raleigh, NC, USA, 1987, pp.1772-1778, 1987. https://doi.org/10.1109/ROBOT.1987.1087767
Y.-S. T. Ren and C.Luo, “Online adaptive control for minimizing slippage error while mobile platform and manipulator operate simultaneously for robotics mobile manipulation”, The 41st Annual Conference of the IEEE Industrial Electronics Society, pp. 2679–2684,.2015. https://doi.org/10.1109/IECON.2015.7392506.
Y. Li, S. Dai, L. Zhao, X. Yan, and Y. Shi, “Topological design methods for mecanum wheel configurations of an omnidirectional mobile robot,” Symmetry, vol. 11, no. 10, pp.1268. 2019. https://doi.org/10.3390/sym11101268.
M.A.A. Mutalib, N.Z. Azlan, and I.A.B. Mahmood, “Modelling of mobility mechanism for motorized adjustable vertical platform (MAVeP)”, International Conference on Automatic Control and Intelligent Systems (I2CACIS), Shah Alam, pp. 39–46,.2018. https://doi.org/10.1109/I2CACIS.2018.8603699.
Simbotics Team 1114, “Omnidirectional Drive,” 2018.
Z. Lieping, H. Chaoning, and C. Peng, “Design of limited power omni-directional vehicle based on chassis follow,” International Conference on Smart City and Systems Engineering (ICSCSE), Changsha, pp. 10–13, 2017, https://doi.org/10.1109/ICSCSE.2017.10.
C. Tsai, F. Tai and Y. Lee, "Motion controller design and embedded realization for Mecanum wheeled omnidirectional robots", 2011 9th World Congress on Intelligent Control and Automation, Taipei, pp.546-551, 2011. https://doi.org/10.1109/WCICA.2011.5970573.
Q. Zhang, D. Li, W. Pei, and Y. Jia, "A TSK fuzzy model and adaptive sliding-mode controller design for four-Mecanum-wheel omni-directional mobile free-bases", Chinese Automation Congress (CAC), Wuhan, pp.1862-1867, 2015. https://doi.org/10.1109/CAC.2015.7382807.
C. Tsai, and H. Wu, “Non-singular terminal sliding control using fuzzy wavelet networks for mecanum wheeled omni-directional vehicles”, International Conference on Fuzzy Systems, Barcelona. pp.1-6, 2010. https://doi.org/10.1109/FUZZY.2010.5584223.
C. Tsai, H. Wu and F. Tai, "Intelligent sliding-mode formation control for uncertain networked heterogeneous mecanum-wheeled omni directional platforms," 2016 IEEE International Conference on Systems, Man, and Cybernetics (SMC), Budapest, 2016, pp. 539-544, https://doi.org/10.1109/SMC.2016.7844295.
P. Viboonchaicheep, A. Shimada and Y. Kosaka, "Position rectification control for mecanum wheeled omni-directional vehicles", IECON'03. IECON'03 29th Annual Conference of the IEEE Industrial Electronics Society (IEEE Cat. No.03CH37468), Roanoke, VA, USA, 2003, pp. 854-859 vol.1, https://doi.org/10.1109/IECON.2003.1280094.
C. Tsai, H. Wu, F. Tai and Y. Chen, "Adaptive backstepping decentralized formation control using fuzzy wavelet neural networks for uncertain mecanum-wheeled omnidirectional multi-vehicles," 2016 IEEE International Conference on Industrial Technology (ICIT), Taipei, pp. 1446-1451, 2016. https://doi.org/10.1109/ICIT.2016.7474971.
A.F.M. Fuad, I.A. Mahmood, S. Ahmad, N.M.H. Norsahperi, S.F. Toha, R. Akmeliawati and F.J. Darsivan, "Modeling and simulation for heavy-duty mecanum wheel platform using model predictive control", IOP Conference Series: Materials Science and Engineering, vol. 184, p. 012050. 2017. https://doi.org/10.1088/1742-6596/755/1/011001.
K. Han, H. Kim and J. S. Lee, "The sources of position errors of omni-directional mobile robot with Mecanum wheel", 2010 IEEE International Conference on Systems, Man and Cybernetics, Istanbul, pp. 581-586, 2010. https://doi.org/2010.1109/ICSMC.202010.5642009.
S. Shahin, R. Sadeghian, P. Sedigh and M.T. Masouleh, "Simulation, control and construction of a four mecanum-wheeled robot," 2017 IEEE 4th International Conference on Knowledge-Based Engineering and Innovation (KBEI), Tehran, pp. 0315-0319, 2017. https://doi.org/10.1109/KBEI.2017.8324993.
Z. Lieping, H. Chaoning and C. Peng, "Design of Limited Power Omni-Directional Vehicle Based on Chassis Follow", The International Conference on Smart City and Systems Engineering (ICSCSE), Changsha, pp. 10-13, 2017. https://doi.org/10.1109/ICSCSE.2017.10.
Fahmizal and C. Kuo, "Trajectory and heading tracking of a mecanum wheeled robot using fuzzy logic control", International Conference on Instrumentation, Control and Automation (ICA), Bandung, pp. 54-59, 2016. https://doi.org/2010.1109/ICA.2016.7811475.
H. Wu, C. Tsai and F. Tai, "Adaptive nonsingular terminal sliding-mode formation control using ORFWNN for uncertain networked heterogeneous mecanum-wheeled omni directional robots", The IEEE International Conference on Systems, Man, and Cybernetics (SMC), Banff, AB, pp. 3317-3322, 2017. https://doi.org/10.1109/SMC.2017.8123141.
L. Xie, W. Herberger, W. Xu and K.A. Stol, "Experimental validation of energy consumption model for the four-wheeled omnidirectional mecanum robots for energy-optimal motion control", IEEE 14th International Workshop on Advanced Motion Control (AMC), Auckland, pp. 565-572, 2016. https://doi.org/10.1109/AMC.2016.7496410.
L.-C. Lin and H.-Y. Shih, “Modeling and adaptive control of an omni-mecanum-wheeled robot”, Intelligent Control Automation, vol. 4, no. 2, pp. 166–179, 2013. https://doi.org/10.4236/ica.2013.42021.
P. Chotikunnan, T. Matsuura, N. Thongpance, M. Sangworasil, T. Pluemchan, P. Wannarat, and A. Teerasoradech, "The design and construction of surrounding control system for the rehabilitative walker using mecanum wheel", 10th Biomedical Engineering International Conference (BMEiCON), Hokkaido, pp.1-4, 2017. https://doi.org/10.1109/BMEiCON.2017.8229166.
R. Wen and M. Tong, "Mecanum wheels with Astar algorithm and fuzzy PID algorithm based on genetic algorithm", International Conference on Robotics and Automation Sciences (ICRAS), Hong Kong, pp. 114-118, 2017. https://doi.org/10.1109/ICRAS.2017.8071927.
V. Alakshendra, and S.S. Chiddarwar, “A robust adaptive control of mecanum wheel mobile robot: Simulation and experimental validation,” IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Daejeon, pp. 5606–5611, 2016. https://doi.org/10.1109/IROS.2016.7759824.
P. Vlantis, C. P. Bechlioulis, G. Karras, G. Fourlas, and K. J. Kyriakopoulos, “Fault tolerant control for omni-directional mobile platforms with 4 mecanum wheels”, IEEE International Conference on Robotics and Automation (ICRA), Stockholm, pp. 2395–2400,.2016. https://doi.org/10.1109/ICRA.2016.7487389.
W.A. Blyth, D.R.W. Barr, and F. Rodriguez y Baena, “A reduced actuation mecanum wheel platform for pipe inspection,” IEEE International Conference on Advanced Intelligent Mechatronics (AIM), Banff pp. 419–424, 2016. https://doi.org/ 10.1109/AIM.2016.7576803.
C. He, D. Wu, K. Chen, F. Liu, and N. Fan, “Analysis of the Mecanum wheel arrangement of an omnidirectional vehicle”, Proceedings of the Instituion of Mechanical Engineers, Part C: Journal of Mechanical Engineering Science, vol. 233, no. 15, pp. 5329–5340, 2019. https://doi.org/10.1177/0954406219843568.
L. Zhang, J. Kim, and J. Sun, “Energy modeling and experimental validation of four-wheel mecanum mobile robots for energy-optimal motion control", Symmetry, vol. 11, no. 11, pp.1372, 2019, https://doi.org/10.3390/sym11111372.
C.M. Kumile, and N.S. Tlale, “Intelligent Distributed Fuzzy Logic Control System (IDFLCS) of a mecanum wheeled autonomous guided vehicle”, IEEE IEEE International Conference Mechatronics and Automation, 2005, Niagara Falls, Ontario, pp. 131–137, 2005. https://doi.org/10.1109/ICMA.2005.1626535.
Y. Li, S. Dai, Y. Shi, L. Zhao, and M. Ding, “Navigation simulation of a mecanum wheel mobile robot based on an improved A* Algorithm in unity 3D,” Sensors, vol. 19, pp.2976, 2019. https://doi.org/10.3390/s19132976.
I. Oh, G. Kwon, and H. Yang, “A study of position estimation considering wheel slip of mecanum wheeled mobile robot”, Journal of the Korea Institute of Military Science and Technology, 22, no. 3, pp.401-407, 2019. https://doi.org/10.9766/KIMST.2019.22.3.401.
R. Bai, “Workbench control system design based on mecanum wheel,” IOP Conference Series Materials Science and Engineering, vol. 688, 022062, 2019, https://doi.org/10.1088/1757-899X/688/2/022062.
K. Han, O. Choi, J. Kim, H. Kim, and J. S. Lee, “Design and control of mobile robot with mecanum wheel,” ICCAS-SICE, Fukuoka, pp. 2932–2937, 2009.
F. Tóth, K. Rebrová, G. Za?ko, P. Kras?anský and B. Roha'l-Ilkiv, "Mobile robot control using XCS", International Conference on Process Control (PC), Strbske Pleso, pp. 504-509, 2013. https://doi.org/10.1109/PC.2013.6581461.
F. Tóth, P. Kras?anský, M. Gulan and B. Rohal'-Ilkiv, "Control systems in omni-directional robotic vehicle with mecanum wheels", International Conference on Process Control (PC), Strbske Pleso, pp.516-521, 2013. https://doi.org/10.1109/PC.2013.6581463.
R. Sadeghian, P. Azizinezhad, P. Sedigh, S. Shahin and M. T. Masouleh, "Control of a four-mecanum wheeled robot with a soft-robotic glove", IEEE 4th International Conference on Knowledge-Based Engineering and Innovation (KBEI), Tehran, pp. 310-314, 2017. https://doi.org/10.1109/KBEI.2017.8324992.
M.Y. Naing, A.S. Oo, I. Nilkhamhang and T. Than, "Development of computer vision-based movement controlling in mecanum wheel robotic car", The 1st International Symposium on Instrumentation, Control, Artificial Intelligence, and Robotics (ICA-SYMP), Bangkok, Thailand, pp. 45-48, 2019. https://doi.org/10.1109/ICA-SYMP.2019.8646254.
Downloads
Published
How to Cite
Issue
Section
Categories
License
Copyright (c) 2020 Mohd Azri Abd Mutalib, Norsinnira Zainul Azlan

This work is licensed under a Creative Commons Attribution 4.0 International License.